Sistemas de control no lineales
Version 10 extends its control systems capabilities to fully embrace nonlinear systems. Affine and general nonlinear systems can be exactly represented. Not only does this allow for simulation of closed-loop systems at full fidelity, but it enables a new generation of advanced design and analysis techniques. Nonlinear control design using only linear techniques and no approximation can be accomplished using exact linearization. In addition, fully nonlinear designs enable asymptotic output tracking or disturbance rejection of modeled disturbances.
- Nuevos modelos de sistema tanto para sistemas no lineales afines como para generales.
- Soporte automático para linealización exacta de sistemas afines que permiten efectivamente el diseño de control no lineal usando cualquier técnica de diseño de control lineal. »
- Soporte automático para linealización de Carleman de sistemas generales no lineales para sistemas afines. »
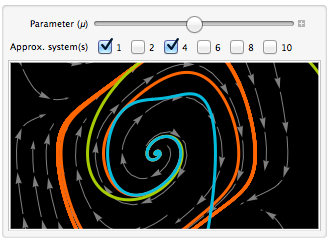
- Soporte automático para linealización de Taylor de sistemas afines y generales no lineales para sistemas lineales estándar.
- Conecte fácilmente sistemas lineales, afines y no lineales para simular sistemas de circuito cerrado de alta fidelidad.
- Paquete completo de técnicas de análisis estándar (controlabilidad, observabilidad, órdenes relativos vectoriales, etc.) para sistemas afines.
- Transformaciones generales de estado-tiempo para sistemas afines y generales no lineales.
- Descomposiciones triangulares canónicas estándar para sistemas afines.
- Diseño automático de regulador completo de salida de información, para compensar las perturbaciones modeladas.
- Rastreador asintótico de salida para rastrear las trayectorias de salida deseadas.
- Habilidad ampliada para manipular sistemas, incluyendo la extracción de subsistemas, sistemas fusionados, etc.
- Soporte para evaluar la estabilidad de sistemas no lineales usando criterios de círculo y de Popov.
Related Examples
 Affine Nonlinear Systems »
Affine Nonlinear Systems »
 Examples of Affine Systems »
Examples of Affine Systems »
 General Nonlinear Systems »
General Nonlinear Systems »
 Example of a General Nonlinear System »
Example of a General Nonlinear System »
 Feedback Linearization »
Feedback Linearization »
 Estimator Design Using Feedback Linearization »
Estimator Design Using Feedback Linearization »
 Carleman Linearization »
Carleman Linearization »
 Evaluate a Linear Controller Design Using Nonlinear Simulation »
Evaluate a Linear Controller Design Using Nonlinear Simulation »

Funciones relacionadasAffineStateSpaceModel  NonlinearStateSpaceModel FeedbackLinearize StateTransformationLinearize CarlemanLinearize LinearizingTransformationData StateSpaceTransform FullInformationOutputRegulator AsymptoticOutputTracker SystemsModelVectorRelativeOrders ControllableModelQ ObservableModelQ ControllableDecomposition ObservableDecomposition SystemsModelLinearity StateSpaceModel SystemsModelMerge StateFeedbackGains OutputResponse FeedbackSector
NonlinearStateSpaceModel FeedbackLinearize StateTransformationLinearize CarlemanLinearize LinearizingTransformationData StateSpaceTransform FullInformationOutputRegulator AsymptoticOutputTracker SystemsModelVectorRelativeOrders ControllableModelQ ObservableModelQ ControllableDecomposition ObservableDecomposition SystemsModelLinearity StateSpaceModel SystemsModelMerge StateFeedbackGains OutputResponse FeedbackSector
NonlinearStateSpaceModel FeedbackLinearize StateTransformationLinearize CarlemanLinearize LinearizingTransformationData StateSpaceTransform FullInformationOutputRegulator AsymptoticOutputTracker SystemsModelVectorRelativeOrders ControllableModelQ ObservableModelQ ControllableDecomposition ObservableDecomposition SystemsModelLinearity StateSpaceModel SystemsModelMerge StateFeedbackGains OutputResponse FeedbackSector



