Sistemas de Controle Não Linear
Version 10 extends its control systems capabilities to fully embrace nonlinear systems. Affine and general nonlinear systems can be exactly represented. Not only does this allow for simulation of closed-loop systems at full fidelity, but it enables a new generation of advanced design and analysis techniques. Nonlinear control design using only linear techniques and no approximation can be accomplished using exact linearization. In addition, fully nonlinear designs enable asymptotic output tracking or disturbance rejection of modeled disturbances.
- Novos modelos de sistema para sistemas não lineares gerais e afins.
- O suporte automático para linearização exata de sistemas afins efetivamente permite o projeto de controle não linear usando qualquer técnica de projeto de controle linear. »
- Suporte automático para linearização Carleman de sistemas não lineares gerais para sistemas afins. »
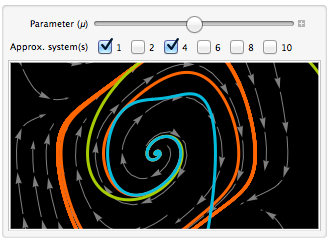
- Suporte automático para linearização de Taylor de sistemas não lineares gerais e afins para sistemas lineares padrão.
- Conecte facilmente sistemas não lineares, afins e lineares para simular sistemas de malha fechada com alta fidelidade.
- Conjunto completo de técnicas de análise padrão (controlabilidade, observabilidade, ordem relativa dos vetores, etc.) para sistemas afins.
- Transformações do espaço de estados gerais para sistemas não lineares gerais e afins.
- Decomposição triangular canônica padrão para sistemas afins.
- Projeto automático de regulador de saída completamente informado, para compensar distúrbios modelados.
- Rastreador de saída assintótica para acompanhar trajetórias de saída desejadas.
- Habilidade estendida para manipular sistemas, incluindo a extração de subsistema, fusão de sistemas, etc.
- Suporte para avaliar estabilidade de sistemas não lineares usando critério do círculo e de Popov.
Related Examples
 Affine Nonlinear Systems »
Affine Nonlinear Systems »
 Examples of Affine Systems »
Examples of Affine Systems »
 General Nonlinear Systems »
General Nonlinear Systems »
 Example of a General Nonlinear System »
Example of a General Nonlinear System »
 Feedback Linearization »
Feedback Linearization »
 Estimator Design Using Feedback Linearization »
Estimator Design Using Feedback Linearization »
 Carleman Linearization »
Carleman Linearization »
 Evaluate a Linear Controller Design Using Nonlinear Simulation »
Evaluate a Linear Controller Design Using Nonlinear Simulation »








FUNÇÕES RELACIONADASAffineStateSpaceModel  NonlinearStateSpaceModel FeedbackLinearize StateTransformationLinearize CarlemanLinearize LinearizingTransformationData StateSpaceTransform FullInformationOutputRegulator AsymptoticOutputTracker SystemsModelVectorRelativeOrders ControllableModelQ ObservableModelQ ControllableDecomposition ObservableDecomposition SystemsModelLinearity StateSpaceModel SystemsModelMerge StateFeedbackGains OutputResponse FeedbackSector
NonlinearStateSpaceModel FeedbackLinearize StateTransformationLinearize CarlemanLinearize LinearizingTransformationData StateSpaceTransform FullInformationOutputRegulator AsymptoticOutputTracker SystemsModelVectorRelativeOrders ControllableModelQ ObservableModelQ ControllableDecomposition ObservableDecomposition SystemsModelLinearity StateSpaceModel SystemsModelMerge StateFeedbackGains OutputResponse FeedbackSector
NonlinearStateSpaceModel FeedbackLinearize StateTransformationLinearize CarlemanLinearize LinearizingTransformationData StateSpaceTransform FullInformationOutputRegulator AsymptoticOutputTracker SystemsModelVectorRelativeOrders ControllableModelQ ObservableModelQ ControllableDecomposition ObservableDecomposition SystemsModelLinearity StateSpaceModel SystemsModelMerge StateFeedbackGains OutputResponse FeedbackSector



